Max weight capacity: 500kg, can be customized
Max working radius: 2500mm, can be customized
Max vertical lifting speed: Adjustable
Vertical lifting height: 0-2000mm
Control system: Pneumatic
Working pressure: 0.5-0.8MPa
Working temperature: From 0℃ to 45℃
Noise level: <70 dB
Rotations: 360°
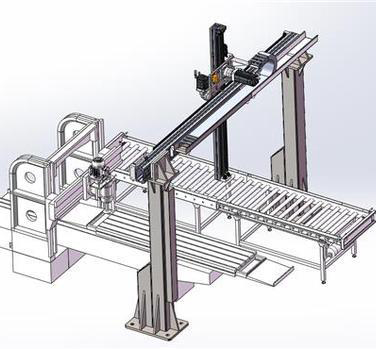
TONGLI INDUSTRIAL RIGID ARM MANIPULATOR
Rigid arm manipulators are made up of rigid arms. In the case of torsion resistance, such as the workpiece is irregular or the workpiece needs to be flipped, it can only use the rigid arm manipulator.
TYPES OF MANIPULATOR
1.According to the installation basis, it is divided into: 1) ground stationary type, 2) ground movable type, 3) suspension stationary type, 4) suspension movable type (gantry frame);
2.Clamp is usually customized according to the dimension of the workpiece provided by the customer. Generally it has the following structure: 1) hook type, 2) grab, 3) clamping, 4) air shaft, 5) lift type, 6) clamping double transformation (flip 90 ° or 180 °), 7) vacuum adsorption, 8) vacuum adsorption double transformation (flip 90 ° or 180 °). In order to achieve the best effect of use, you can select and design clamps according to the workpiece and working environment.